区分实际网格几何图形和由计算辅助设计(CAD)程序生成的几何图形非常重要。虽然在上一章中已经用了一些关于一般网格连接的内容,但这里还是给出了实际网格是如何存储在文件系统中的概述。在标准的OpenFOAM案例中,有三个主要目录:0、constant和system。0文件夹存储网格生成过程中不需要的场的初始条件,system目录存储与模拟的数值和整体执行有关的设置。本章考虑的是constant目录,因为其存储网格,包括所有与空间和连接相关的数据。有关OpenFOAM案例结构的其他详细信息将在第3章中提供。
只要使用静态网格,计算网格始终存储在Constant/PolyMesh目录中。此处的静态网格是指在模拟过程中不会发生改变的网格,即使点位移或连接性发生变化。网格数据自然位于此处,因为假设它是恒定的,因此是Constant文件夹。从编程的角度来看,它被描述为PolyMesh,这是对OpenFOAM网格及其所有功能和限制的一般描述。对于给定的静态网格情况,网格数据将存储在常量/多边形网格中。这里找到的典型网格数据文件包括:points、faces、owner、neighbour及boundary。当然,包含的数据必须有效,才能正确定义网格。
在下面的讨论中,以potentialFoam求解器的PitzDaily教程为例,可以通过发出以下命令找到该示例
?> tut
?> cd basic/potentialFoam/pitzDaily
检查PolyMesh目录的内容后,很明显其还不包含所需的网格数据。本教程中仅提供了blockMeshDict,在case目录中执行blockMesh会生成网格和关联的连接数据:
?> ls constant/polyMesh
blockMeshDict boundary
?> blockMesh
?> ls constant/polyMesh
blockMeshDict boundary faces neighbour owner points
以前使用过CFD代码的用户,特别是使用基于结构化网格的代码的用户,可能会错过每个网格单元的寻址。
OpenFOAM中的非结构化FVM方法不是基于每个单元构建网格,而是基于每个网格面构建网格。以下列表说明了Constant/PolyMesh中每个文件的用途。
1、points
定义向量场中网格的所有节点,其中它们在空间中的位置以米为单位。这些点并非细胞中心,而是网格的角点。要将网格在正x方向上平移1米,必须相应地更改每个节点。不需要为此更改polyMesh子目录中的任何其他结构,节2.4介绍了这一点。
通过使用文本编辑器打开相应的文件,可以更仔细地查看这些点。为了限制输出,忽略标题,只显示前几行:
?> head -25 constant/polyMesh/points | tail -7
25012 // 节点数量
((-0.0206 0 -0.0005) // 点0的坐标
(-0.01901716308 0 -0.0005) // 点1的坐标
(-0.01749756573 0 -0.0005)
(-0.01603868134 0 -0.0005)
(-0.01463808421 0 -0.0005)
该文件包含一个包含25012个点的列表。此列表不需要以任何方式排序。此外,列表中的所有节点都是唯一的,这意味着相同的点坐标不能多次出现。访问和寻址这些点是通过vectorField中的列表位置从0开始执行的。该位置存储为label。
2、faces
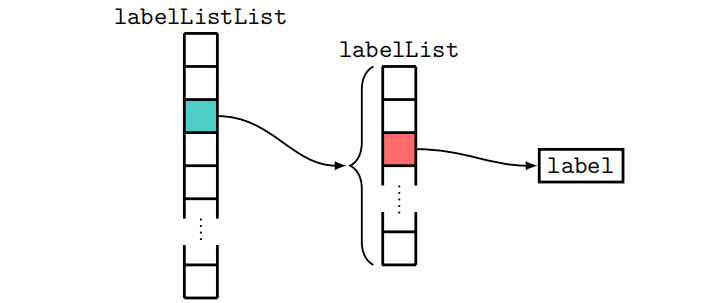
根据点在点向量场中的位置合成网格面,并将其存储在labelListList中。这是一个嵌套列表,每个面包含一个元素。这些元素中的每一个都有自己的labelList,存储用于构造面的points的标签。图2.1显示了labelListList的结构。
每个网格面必须至少由三个节点组成,其大小后面紧跟一个点标签列表。在网格面上,每个节点都通过一条直边与其相邻的点相连[4]。使用定义网格面的节点,可以计算表面积矢量,其方向由右手定则确定。
同样,仅显示faces文件的前几行以保持简短:
?> head -25 constant/polyMesh/faces | tail -7
49180 // 网格面的数量
(
4(1 20 172 153) // 网格面0包含4个节点,其标签为(1 20 172 153)
4(19 171 172 20)
4(2 21 173 154)
4(20 172 173 21)
4(3 22 174 155)
...
)
从输出的第一行可以看出,网格由49180个网格面组成,上面只显示了其中的一个子集。与面列表的长度49180类似,每个labelList的长度在列表开始之前声明。因此,此处显示的所有面都是从4个点构建的,这些点由它们在点列表中的位置表示。
3、owner
Owner也是一个与存储面的列表具有相同维度的labelList。由于面已构建并存储在面列表中,因此必须定义它们与体网格的从属关系。根据定义,一个网格面只能在两个相邻的网格之间共享。owner列表存储哪个面属于哪个网格,而这是根据网格标签来决定的。具有较低单元格标签的网格拥有该面,其另一个面被视为neighbor。它指示代码第一个面(列表中的索引0)属于标签存储在该位置的网格。
查看下面的owner文件可知,网格面0、1、2、3分别归属于网格单元0、0、1、1。owner文件中的网格面数量与faces文件中的网格面数量一致。
?> head -25 constant/polyMesh/owner | tail -7
49180
(0
0
1
1
同样,上一章解释了owner-neighbour寻址的工作原理。
4、neighbour
neighbour必须与owner列表结合起来一起考虑,其与owner列表相反。neighbour存储相邻的网格,而不是定义哪个网格拥有每个特定的面。将owner文件与neighbour文件进行比较,可以发现它们的主要区别:owner列表要短得多。这是因为边界面没有相邻的网格。
?> head -25 constant/polyMesh/neighbour | tail -7
24170
(1
18
2
19
5、boundary
边界包含有关嵌套子字典列表中网格边界的所有信息。边界通常被称为patch或边界patch。与之前的网格组件类似,仅显示了一些相关行:
?> head -25 constant/polyMesh/boundary | tail -8
5
(
inlet
{
type patch;
nFaces 30;
startFace 24170;
}
对于本节中使用的 pitzDaily 示例,边界文件包含 5 个patch的列表。每个patch由一个字典表示,由patch名开始。字典中包含的信息包括:patch类型、面数和起始面。由于面列表的排序,可以使用此约定快速轻松地处理属于某个面片的面。
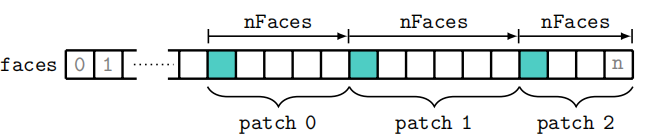
边界面的寻址方法如图 2.2 所示。根据设计,所有没有neighbor的面都被存放在faces列表的末尾,根据他们的owner patch对其进行排序。所有作为边界面的面都必须被边界描述所覆盖。
从用户的角度来看,点和面、owner和neighbor都不需要手动接触或操作。如果手动更改它们,这肯定会破坏网格。但是,根据工作流程,可能需要针对某些设置更改边界文件。更改边界文件的最可能原因是更改patch名称或类型。在此处进行此更改可能比重新运行相应的网格生成器要容易得多。
现在解释了 OpenFOAM 网格的基本结构,接下来将回顾边界类型。有几种类型可以分配给边界,其中一些比其他更常见。区分边界(或patch)和边界条件(见图 2.3)很重要。
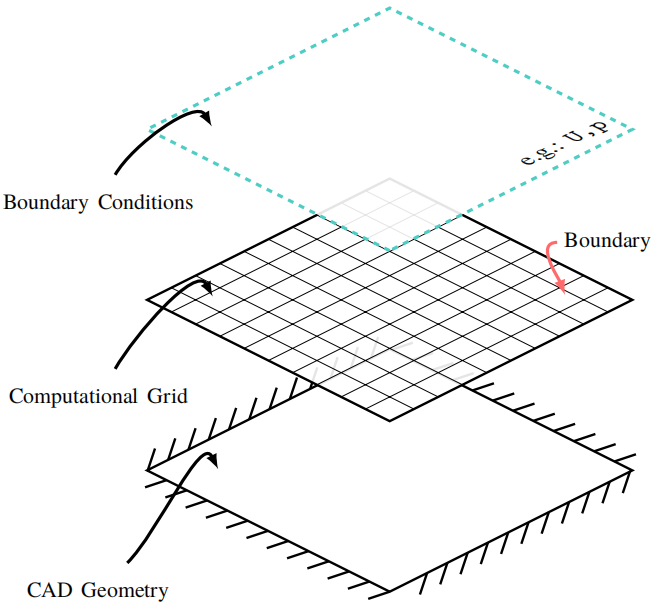
patch是计算域的外边界,其在边界文件中指定,因此是一种拓扑属性。边界和 CAD 几何之间的逻辑联系是两者的表面应尽可能相同。用网格拓扑表示,它是一组面,只有一个owner网格,没有neighbor网格。与patch相反,边界条件分别应用于每个物理场(U、p 等)的patch。patch类型有:
Patch。大多数patch(边界)可以用patch类型来描述,因为它是最一般的描述。 Neumann、Dirichlet 或 Cauchy 边界条件都可以应用于这种类型的边界。wall。如果patch被定义为wall,这并不意味着没有流体通过过该边界。它仅使湍流模型能够正确地将壁面函数应用于该patch(参见第 7 章),仍然需要通过速度边界条件明确定义防止流体通过类型为wall的patch。symmetryPlane。将patch类型设置为 SymmetryPlane 声明它充当对称平面。除了 SymmetryPlane 之外,不能对其应用其他边界条件,并且必须将其应用于所有物理场。empty。在二维模拟的情况下,这种类型应该应用于“平面内”的patch。与 SymmetryPlane 类型类似,这些patch的边界条件也必须为所有物理场设置为empty。不会对这些patch应用其他边界条件。两个empty边界之间的所有网格边必须平行,否则无法进行精确的二维模拟。cyclic。如果一个几何结构由多个相同的部件组成(例如螺旋桨叶片或涡轮叶片),则只需将其中一个组件离散化并将其视为位于相同组件之间。对于四叶片螺旋桨,这意味着只有一个叶片是网格化的(90° 网格),并通过将cyclic边界类型分配给具有切线方向法线的patch。然后这些patch将充当物理耦合。wedge。这种边界类型类似于cyclic边界,只是专门为形成小的(例如≤5°)楔形的循环边界设计的。
从执行和兼容性的角度来看,polyMesh 结构的创建方式并不重要,只要网格数据本身是有效的即可。虽然 OpenFOAM 打包了各种网格生成工具,但只要可以进行有效的转换或输出,就可以使用外部第三方网格生成器。
除了上面提到的 OpenFOAM 网格的基本核心组件之外,还有各种可选的网格结构,它们只能用于特定的应用程序。由于它们是可选的,因此无论案例设置如何,它们都可以存在。 OpenFOAM 应用程序会根据需要读取它们,并在它们丢失时向用户报告。
6、Sets及Zones
作为用户,当用户担心时,很容易被 OpenFOAM 中的区域(zones)和集合(sets)以及两者都非常相似的事实所混淆:他们选择网格实体。对使用哪个问题的非常简短的回答是:使用区域,正如 Hrvoje Jasak 通过 Twitter 简要解释的那样(参见图 2.4)。
然而,这仅与求解器应用程序真正相关。如果应用程序以预处理或后处理为中心,则任何一个都可以。Set本质上是 labelHashSets,而Zone继承自 labelLists。两者都可以将任何网格实体(点、面或单元)存储在类似于列表的数据结构中。主要区别在于网格实体的内部处理,特别是在具有拓扑网格变化的并行模拟的情况下。在这种情况下,必须相应地更新列表中的地址,并且只有Zone提供这种方法。
选择通常由工具 setSet 或 topoSet 执行,它们都可以选择网格的子集并对其进行布尔运算。一般来说,这两个实用程序都可以将区域转换为集合,反之亦然。可以为任何网格实体(单元、点或面)创建集合或区域,但 cellSet 和 cellZone 是最常用的两个。区域作为普通字典存储在 constant/polyMesh 中,而集合存储在 constant/polyMesh 的 sets 子目录中。区域和集合以相同的方式存储在文件系统中:作为相应网格实体的标签的长列表。
我们已经发布了一些博客文章,其中包含有关区域和集合如何组装的一定程度的信息 [2, 1]。
2.1.1 CAD几何
导入外部 CAD 软件中生成的几何图形是CFD 工程师的常规任务。在 OpenFOAM 中,这通常使用 snappyHexMesh 执行,但是,稍后将解释这个网格生成器的用法。目前唯一重要的概念是本节仅处理Stereolithography(STL) 文件的导入。支持其他文件类型并以类似的方式工作。 STL 是一种文件格式,可以以三角面片方式存储几何图形的表面。二进制和 ASCII 编码文件都是可能的,但为了简单起见,我们将使用 ASCII 编码。
作为 STL 文件的示例,以下代码段显示了仅由一个三角形组成的 STL 曲面:
solid TRIANGLE
facet normal -8.55322e-19 -0.950743 0.30998
outer loop
vertex -0.439394 1.29391e-18 -0.0625
vertex -0.442762 0.00226415 -0.0555556
vertex -0.442762 1.29694e-18 -0.0625
endloop
endfacet
endsolid TRIANGLE
在此示例中,仅定义了一个名为 TRIANGLE 的实体。一个 STL 文件可能包含多个实体,这些实体一个接一个地定义。组成表面的每个三角形都有一个法线向量和三个点。
使用 ASCII STL 文件的缺点是它们的文件大小会随着表面分辨率的增加而迅速增长。边没有明确包含,因为文件中只存储了三角形。因此,从 STL 中识别和提取特征边缘有时是一项具有挑战性的任务。
使用 STL 作为文件格式的一个优点是可以获得三角形表面网格,根据定义,它总是具有平面表面组件(三角形)。