前面的部分对不同优化方法的优缺点进行了许多评论。接下来,我们将通过一个实际例子展示这些特性实际上产生了多大的差异。
18.1 问题描述
我们将考虑一个非常简单的设置,以清楚地说明发生了什么:我们有一个二维输入空间,一个同样具有两个维度的模拟“物理模型”,以及一个标量损失,即,,以及。向量的分量用表示,并且为了与Python数组保持同步,索引从0开始。
具体而言,我们将使用以下和:
\quad \mathbf{y}(\mathbf{x}) = \mathbf{y}(x_0, x_1) = \begin{bmatrix} x_0 \ x_1^2 \end{bmatrix}
即 仅对其输入的第二个分量进行平方, 表示一个简单的平方 损失。作为一些示例优化的起点,我们将使用 \mathbf{x} = \begin{bmatrix} 3 \ 3 \end{bmatrix} 作为解决以下简单最小化问题的初始猜测:。
对于我们人类来说, 是正确的答案,但让我们看看前面讨论的不同优化算法如何快速找到该解。
18.2 三个空间
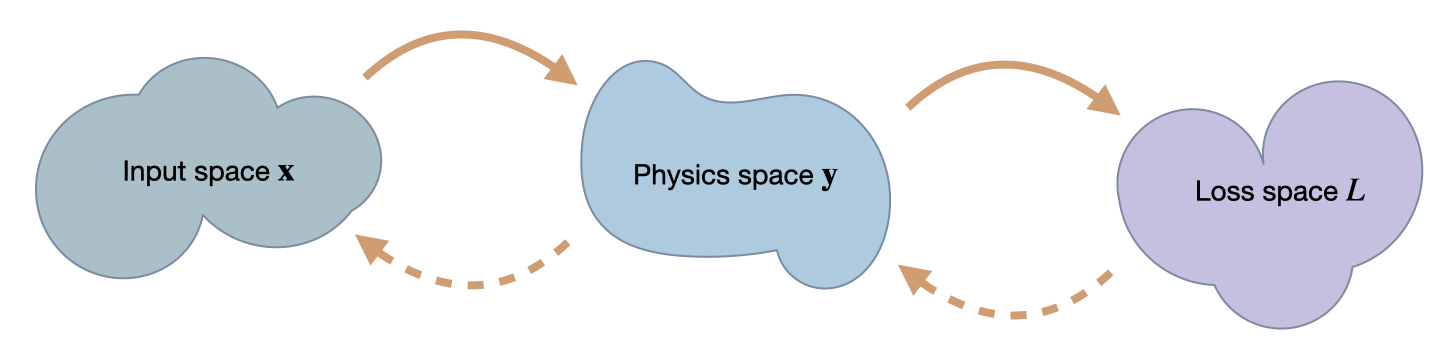
为了理解以下示例,重要的是要记住我们在这里处理的是三个“空间”之间的映射:、和。常规前向传递通过将映射到,而对于优化,我们需要将中的值和变化与中的位置相关联。在这样做的同时,有趣的是看看在寻找的正确位置时,它是如何影响到在中形成的位置。
18.3 实现
在这个例子中,我们将使用JAX框架,它是一个有效地处理可微函数的良好选择。JAX还有一个很好的numpy封装,实现了大部分numpy的函数。下面我们将使用这个封装作为np,而将原始的numpy作为onp。
import jax
import jax.numpy as np
import numpy as onp
我们将首先定义和函数,以及一个调用L和y的复合函数fun。对于许多JAX操作,拥有一个单一的本地Python函数是必要的。
# "physics" function y
def physics_y(x):
return np.array( [x[0], x[1]*x[1]] )
# simple L2 loss
def loss_y(y):
#return y[0]*y[0] + y[1]*y[1] # "manual version"
return np.sum( np.square(y) )
# composite function with L & y , evaluating the loss for x
def loss_x(x):
return loss_y(physics_y(x))
x = np.asarray([3,3], dtype=np.float32)
print("Starting point x = "+format(x) +"\n")
print("Some test calls of the functions we defined so far, from top to bottom, y, manual L(y), L(y):")
physics_y(x) , loss_y( physics_y(x) ), loss_x(x)
Starting point x = [3. 3.]
Some test calls of the functions we defined so far, from top to bottom, y, manual L(y), L(y):
现在我们可以通过jax.grad来评估我们函数的导数。例如,jax.grad(loss_y)(physics_y(x))评估了雅可比矩阵。下面的代码单元格评估了这个雅可比矩阵及其几个变体,并对的逆雅可比矩阵进行了一次合理性检查。
# this works:
print("Jacobian L(y): " + format(jax.grad(loss_y)(physics_y(x))) +"\n")
# the following would give an error as y (and hence physics_y) is not scalar
#jax.grad(physics_y)(x)
# computing the jacobian of y is a valid operation:
J = jax.jacobian(physics_y)(x)
print( "Jacobian y(x): \n" + format(J) )
# the code below also gives error, JAX grad needs a single function object
#jax.grad( loss_y(physics_y) )(x)
print( "\nSanity check with inverse Jacobian of y, this should give x again: " + format(np.linalg.solve(J, np.matmul(J,x) )) +"\n")
# instead use composite 'fun' from above
print("Gradient for full L(x): " + format( jax.grad(loss_x)(x) ) +"\n")
Jacobian L(y): [ 6. 18.]
Jacobian y(x):
[[1. 0.]
[0. 6.]]
Sanity check with inverse Jacobian of y, this should give x again: [3. 3.]
Gradient for full L(x): [ 6. 108.]
最后一行值得仔细观察:在这里,我们打印初始位置的梯度。虽然我们知道我们应该沿对角线朝向原点移动(零向量是最小化器),但是这个梯度并不是非常对角线 - 它在方向上有一个强烈的主导分量,其值为108。
让我们看看不同的方法如何应对这种情况。我们将比较以下三种方法:
- 一阶方法梯度下降(即常规的、非随机的、“最陡峭的梯度下降”)
- 牛顿法作为二阶方法的代表,
- 逆模拟器中的标度不变更新。
18.4 梯度下降
对于梯度下降法,在我们的设置中,基于简单梯度的更新方程(见公式{eq}GD-update)给出了如下关于 的更新步骤:
其中 表示步长参数。
让我们从开始使用梯度下降进行优化,并使用更新我们的解十次:
x = np.asarray([3.,3.])
eta = 0.01
historyGD = [x]; updatesGD = []
for i in range(10):
G = jax.grad(loss_x)(x)
x += -eta * G
historyGD.append(x); updatesGD.append(G)
print( "GD iter %d: "%i + format(x) )
GD iter 0: [2.94 1.9200001]
GD iter 1: [2.8812 1.6368846]
GD iter 2: [2.823576 1.4614503]
GD iter 3: [2.7671044 1.3365935]
GD iter 4: [2.7117622 1.2410815]
GD iter 5: [2.657527 1.1646168]
GD iter 6: [2.6043763 1.1014326]
GD iter 7: [2.5522888 1.0479842]
GD iter 8: [2.501243 1.0019454]
GD iter 9: [2.4512184 0.96171147]
在这里,我们已经打印出了中的结果位置,并且它们似乎在下降,即向正确的方向移动。最后一个点距离原点还有2.63的相当距离。
让我们来看一下迭代过程中的进展(演化已存储在上面的history列表中)。蓝色点表示GD迭代中中的位置,目标在原点处用细黑十字表示。
import matplotlib.pyplot as plt
axes = plt.figure(figsize=(4, 4), dpi=100).gca()
historyGD = onp.asarray(historyGD)
updatesGD = onp.asarray(updatesGD) # for later
axes.scatter(historyGD[:,0], historyGD[:,1], lw=0.5, color='#1F77B4', label='GD')
axes.scatter([0], [0], lw=0.25, color='black', marker='x') # target at 0,0
axes.set_xlabel('x0'); axes.set_ylabel('x1'); axes.legend()
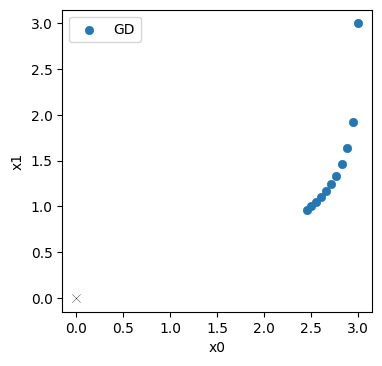
毫不意外的是:初始步骤大部分沿着向下移动(在右上角),之后的更新向原点弯曲。但它们并没有走得很远。到达左下角的解仍然相当遥远。
18.5 牛顿法
对于牛顿法, 更新步骤给出 因此,除了与GD相同的梯度外,我们现在需要评估和求Hessian矩阵的逆。
在JAX中,这非常简单:我们可以调用jax.jacobian两次,然后使用JAX版本的linalg.inv来反转得到的矩阵。
对于使用牛顿法的优化,我们将使用更大的步长。对于这个例子和下一个例子,我们选择了步长,使得第一次更新步骤的大小大致与GD的大小相同。通过这种方式,我们可以相对于彼此比较所有三种方法的轨迹。请注意,这绝不意味着这里的方法的稳定性或上限的比较。稳定性和的上限是分开的主题。这里我们专注于收敛性质。
在下一个单元格中,我们从相同的初始猜测开始应用十次Newton更新:
x = np.asarray([3.,3.])
eta = 1./3.
historyNt = [x]; updatesNt = []
Gx = jax.grad(loss_x)
Hx = jax.jacobian(jax.jacobian(loss_x))
for i in range(10):
g = Gx(x)
h = Hx(x)
hinv = np.linalg.inv(h)
x += -eta * np.matmul( hinv , g )
historyNt.append(x); updatesNt.append( np.matmul( hinv , g) )
print( "Newton iter %d: "%i + format(x) )
Newton iter 0: [2. 2.6666667]
Newton iter 1: [1.3333333 2.3703704]
Newton iter 2: [0.88888884 2.1069958 ]
Newton iter 3: [0.59259254 1.8728852 ]
Newton iter 4: [0.39506167 1.6647868 ]
Newton iter 5: [0.26337445 1.4798105 ]
Newton iter 6: [0.17558296 1.315387 ]
Newton iter 7: [0.1170553 1.1692328]
Newton iter 8: [0.07803687 1.0393181 ]
Newton iter 9: [0.05202458 0.92383826]
最后一行已经表明:牛顿法的效果要好得多。最后一个点到原点的距离只有0.925(相比于梯度下降法的2.63)。
下面,我们将牛顿法的轨迹以橙色绘制在梯度下降法的蓝色版本旁边。
axes = plt.figure(figsize=(4, 4), dpi=100).gca()
historyNt = onp.asarray(historyNt)
updatesNt = onp.asarray(updatesNt)
axes.scatter(historyGD[:,0], historyGD[:,1], lw=0.5, color='#1F77B4', label='GD')
axes.scatter(historyNt[:,0], historyNt[:,1], lw=0.5, color='#FF7F0E', label='Newton')
axes.scatter([0], [0], lw=0.25, color='black', marker='x') # target at 0,0
axes.set_xlabel('x0'); axes.set_ylabel('x1'); axes.legend()
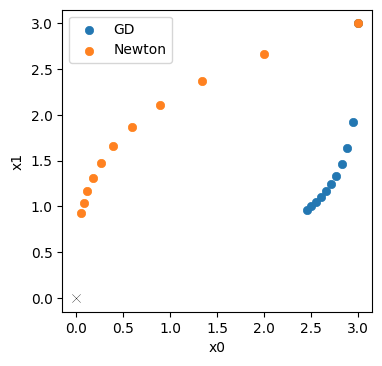
并不完全令人惊讶:对于这个简单的例子,我们可以可靠地评估Hessian矩阵,并且牛顿法从二阶信息中获益。它的轨迹更加沿对角线(这将是理想的、通往解的最短路径),并且不像梯度下降法那样减速明显。
18.6 逆模拟器
现在我们还使用了的解析逆来进行优化。它代表了我们之前章节中的逆模拟器:,用于计算下面所示的尺度不变更新(记为PG)。稍微预告一下下一节,我们将使用牛顿步骤来更新,并将其与逆物理函数结合起来得到整体更新。这给出了一个更新步骤:
下面,我们定义了我们的逆函数physics_y_inv_analytic,然后使用PG更新方法对其进行了十步的优化评估:
x = np.asarray([3.,3.])
eta = 0.3
historyPG = [x]; historyPGy = []; updatesPG = []
def physics_y_inv(y):
return np.array( [y[0], np.power(y[1],0.5)] )
Gy = jax.grad(loss_y)
Hy = jax.jacobian(jax.jacobian(loss_y))
for i in range(10):
# Newton step for L(y)
zForw = physics_y(x)
g = Gy(zForw)
h = Hy(zForw)
hinv = np.linalg.inv(h)
# step in y space
zBack = zForw -eta * np.matmul( hinv , g)
historyPGy.append(zBack)
# "inverse physics" step via y-inverse
x = physics_y_inv(zBack)
historyPG.append(x)
updatesPG.append( historyPG[-2] - historyPG[-1] )
print( "PG iter %d: "%i + format(x) )
PG iter 0: [2.1 2.5099802]
PG iter 1: [1.4699999 2.1000001]
PG iter 2: [1.0289999 1.7569861]
PG iter 3: [0.72029996 1.47 ]
PG iter 4: [0.50421 1.2298902]
PG iter 5: [0.352947 1.029 ]
PG iter 6: [0.24706289 0.86092323]
PG iter 7: [0.17294402 0.7203 ]
PG iter 8: [0.12106082 0.60264623]
PG iter 9: [0.08474258 0.50421 ]
现在我们得到了作为最终位置,仅有0.51的距离!这显然比牛顿法和梯度下降法都要好。
让我们直接可视化一下与牛顿法(橙色)和梯度下降法(蓝色)相比,PGs(红色)的效果如何。
historyPG = onp.asarray(historyPG)
updatesPG = onp.asarray(updatesPG)
axes = plt.figure(figsize=(4, 4), dpi=100).gca()
axes.scatter(historyGD[:,0], historyGD[:,1], lw=0.5, color='#1F77B4', label='GD')
axes.scatter(historyNt[:,0], historyNt[:,1], lw=0.5, color='#FF7F0E', label='Newton')
axes.scatter(historyPG[:,0], historyPG[:,1], lw=0.5, color='#D62728', label='PG')
axes.scatter([0], [0], lw=0.25, color='black', marker='x') # target at 0,0
axes.set_xlabel('x0'); axes.set_ylabel('x1'); axes.legend()
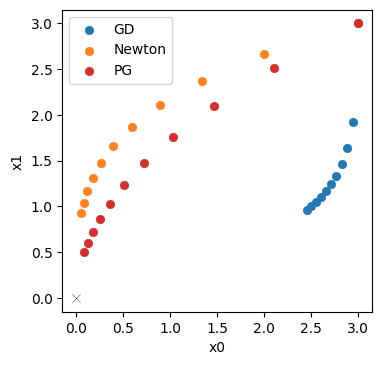
这说明反向模拟器变种红色的PG,甚至比橙色的牛顿法更好。它产生了一条与理想“对角线”轨迹更为一致的轨迹,并且其最终状态更接近原点。这里的一个关键因素是的反函数,它提供了比牛顿法的二阶近似更高阶的项。这改善了优化的尺度不变性。尽管问题很简单,牛顿法在找到正确的搜索方向方面存在问题。另一方面,反向模拟器更新利用了更高阶的信息,为优化提供了改进的方向。
这种差异也体现在每种方法的第一次更新步骤中:下面我们测量它与对角线的对齐程度。
def mag(x):
return np.sqrt(np.sum(np.square(x)))
def one_len(x):
return np.dot( x/mag(x), np.array([1,1]))
print("Diagonal lengths (larger is better): GD %f, Nt %f, PG %f " %
(one_len(updatesGD[0]) , one_len(updatesNt[0]) , one_len(updatesPG[0])) )
Diagonal lengths (larger is better): GD 1.053930, Nt 1.264911, PG 1.356443
PG 的最大值 1.356 证实了我们上面所看到的:PG 梯度是最接近从起点到原点的对角线方向的梯度。
18.7 y 空间
为了理解这些方法的行为和差异,重要的是要记住,我们不是在处理将映射到的黑盒子,而是在处理中间的空间。在我们的情况下,我们只有一个空间,但对于深度学习设置,我们可能有许多潜在空间,我们对其具有一定控制权。我们很快就会回到神经网络,但现在让我们专注于。
首先要注意的是,对于PG,我们显式地从映射到,然后继续映射到。因此,我们已经在空间中获得了轨迹,并且不巧的是,我们已经将其存储在上面的historyPGy列表中。
让我们直接看看逆模拟器在空间中做了什么:
historyPGy = onp.asarray(historyPGy)
axes = plt.figure(figsize=(4, 4), dpi=100).gca()
axes.set_title('y space')
axes.scatter(historyPGy[:,0], historyPGy[:,1], lw=0.5, color='#D62728', marker='*', label='PG')
axes.scatter([0], [0], lw=0.25, color='black', marker='*')
axes.set_xlabel('z0'); axes.set_ylabel('z1'); axes.legend()
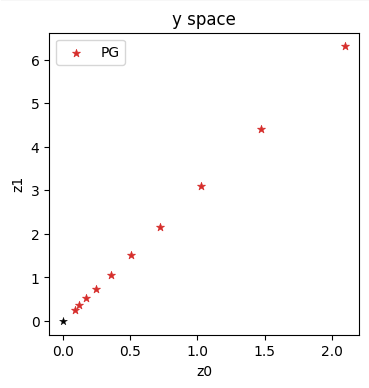
在这个变种中,我们在空间中采取明确的步骤,这些步骤沿着一条直对角线向原点前进(这也是空间中的解)。
有趣的是,无论是梯度下降法(GD)还是牛顿法都无法提供关于中间空间(如空间)进展的信息。
对于梯度下降法,我们正在连接雅可比矩阵,因此我们在局部应该沿着降低损失的方向移动。然而,的位置受到的影响,因此在我们确定在空间的具体点之前,我们不知道最终会到达哪里(对于神经网络来说,一般情况下,在进行梯度下降更新后,我们不知道在哪些潜在空间点上结束,直到我们实际计算出所有更新的权重)。
更具体地说,对于梯度下降法,我们有一个更新,这意味着我们在空间中到达。使用进行泰勒展开得到:
而显然与我们在直接优化时使用的不同。
牛顿法也不太好:我们首先计算像GD一样的一阶导数,然后计算完整过程的Hessian的二阶导数。但由于两者都是近似值,因此更新步骤产生的实际中间状态在评估完整链之前是未知的。在{doc}physgrad中,牛顿法的函数组合一致性段落中,Hessian的平方项已经表明了这种依赖关系。
对于逆模拟器,我们没有这个问题:它们可以直接将空间中的点映射到空间中。因此,我们知道我们在空间中开始的位置,因为这个位置对于评估反演是至关重要的。
在本节的简单设置中,我们只有一个潜在空间,并且我们已经在优化过程中存储了所有的空间中的值(在history列表中)。因此,现在我们可以返回并重新评估physics_y以获取空间中的位置。
x = np.asarray([3.,3.])
eta = 0.01
historyGDy = []
historyNty = []
for i in range(1,10):
historyGDy.append(physics_y(historyGD[i]))
historyNty.append(physics_y(historyNt[i]))
historyGDy = onp.asarray(historyGDy)
historyNty = onp.asarray(historyNty)
axes = plt.figure(figsize=(4, 4), dpi=100).gca()
axes.set_title('y space')
axes.scatter(historyGDy[:,0], historyGDy[:,1], lw=0.5, marker='*', color='#1F77B4', label='GD')
axes.scatter(historyNty[:,0], historyNty[:,1], lw=0.5, marker='*', color='#FF7F0E', label='Newton')
axes.scatter(historyPGy[:,0], historyPGy[:,1], lw=0.5, marker='*', color='#D62728', label='PG')
axes.scatter([0], [0], lw=0.25, color='black', marker='*')
axes.set_xlabel('z0'); axes.set_ylabel('z1'); axes.legend()
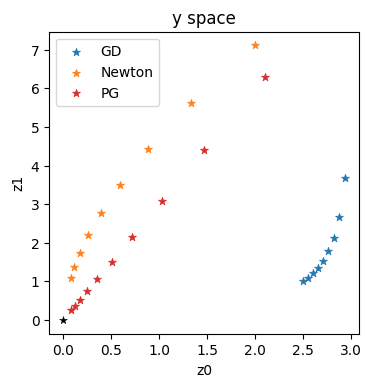
这些轨迹证实了前几节中所概述的直觉:蓝色的梯度下降在方向上给出了一个非常次优的轨迹。牛顿法(橙色)表现更好,但仍然明显弯曲。它不能很好地近似这个例子的高阶项。这与使用逆模拟器进行优化的直线和对角线红色轨迹形成对比。
当中间空间不仅仅是抽象的潜在空间,而是具有实际物理意义时,其行为变得尤为重要。
18.8 结论
尽管简单, 但这个例子已经显示出梯度下降、牛顿法和使用逆模拟器之间令人惊讶的大差异。
本节的主要要点如下。
- GD 很容易产生“不平衡”的更新, 并陷入僵局。
- 牛顿法做得更好, 但远非最优。
- 尽管只应用了部分 (我们上面仍然对 使用了牛顿法), 但逆模拟器的高阶信息优于两者。
- 此外,方法(一般来说是优化器的选择)对潜空间的研究进展也有很大影响,如上文𝑦 的情况所示。
在接下来的章节中, 我们可以基于这些观察结果, 通过可逆物理模型使用 PG 进行神经网络训练。
18.9 近似求逆
如果像上面的physics_y_inv_analytic这样的解析逆函数不容易得到,我们实际上可以采用优化方案,如牛顿法或BFGS,以数值方式获得局部逆函数。这是一个与不同优化方法的比较无关的主题,但可以基于上面的逆模拟器变体进行简单的说明。
下面,我们将使用scipy中的BFGS变体fmin_l_bfgs_b来计算逆函数。这并不是非常复杂,但我们将直接使用numpy和scipy,这使得代码有点混乱。
def physics_y_inv_opt(target_y, x_ini):
# a bit ugly, we switch to pure scipy here inside each iteration for BFGS
import numpy as np
from scipy.optimize import fmin_l_bfgs_b
target_y = onp.array(target_y)
x_ini = onp.array(x_ini)
def physics_y_opt(x,target_y=[2,2]):
y = onp.array( [x[0], x[1]*x[1]] ) # we cant use physics_y from JAX here
ret = onp.sum( onp.square(y-target_y) )
return ret
ret = fmin_l_bfgs_b(lambda x: physics_y_opt(x,target_y), x_ini, approx_grad=True )
#print( ret ) # return full BFGS details
return ret[0]
print("BFGS optimization test run, find x such that y=[2,2]:")
physics_y_inv_opt([2,2], [3,3])
BFGS optimization test run, find x such that y=[2,2]:
array([2.00000003, 1.41421353])
尽管如此,我们现在可以使用这个数值反转的 函数来进行逆模拟器优化。除了调用 physics_y_inv_opt 函数外,其余代码保持不变。
x = np.asarray([3.,3.])
eta = 0.3
history = [x]; updates = []
Gy = jax.grad(loss_y)
Hy = jax.jacobian(jax.jacobian(loss_y))
for i in range(10):
# same as before, Newton step for L(y)
y = physics_y(x)
g = Gy(y)
y += -eta * np.matmul( np.linalg.inv( Hy(y) ) , g)
# optimize for inverse physics, assuming we dont have access to an inverse for physics_y
x = physics_y_inv_opt(y,x)
history.append(x)
updates.append( history[-2] - history[-1] )
print( "PG iter %d: "%i + format(x) )
PG iter 0: [2.09999967 2.50998022]
PG iter 1: [1.46999859 2.10000011]
PG iter 2: [1.02899871 1.75698602]
PG iter 3: [0.72029824 1.4699998 ]
PG iter 4: [0.50420733 1.22988982]
PG iter 5: [0.35294448 1.02899957]
PG iter 6: [0.24705997 0.86092355]
PG iter 7: [0.17294205 0.72030026]
PG iter 8: [0.12106103 0.60264817]
PG iter 9: [0.08474171 0.50421247]
这证实了近似求逆的有效性,与上述常规PG版本一致。没有太多意义来绘制这个,因为基本上是一样的,但我们可以测量差异。下面,我们计算了MAE,对于这个简单的例子,结果与我们的浮点精度相当。
historyPGa = onp.asarray(history)
updatesPGa = onp.asarray(updates)
print("MAE difference between analytic PG and approximate inversion: %f" % (np.average(np.abs(historyPGa-historyPG))) )
MAE difference between analytic PG and approximate inversion: 0.000001
18.10 下一步
基于这个代码示例,你可以尝试以下修改:
- 用其他更复杂的函数替换上述简单的 L(y(x)) 函数。
- 用其他优化器替换简单的“常规”梯度下降,例如常用的 DL 优化器,如 AdaGrad、RmsProp 或 Adam。将现有版本与新轨迹进行比较。