为了说明在可微分物理(DP)环境中计算梯度的过程,我们以5 PINN优化Burgers方程中 PINN 示例中使用的相同逆问题(重建任务)为目标。选择 DP 方法会产生一些直接影响:我们从离散化的 PDE 开始,系统的演化现在完全由由此产生的数值求解器决定。因此,真正的未知数只有初始状态。我们仍然需要多次重新计算初始状态和目标状态之间的所有状态,只是现在我们不需要 NN 来完成这一步骤。取而代之的是模型方程的离散化。
另外, 由于我们为 DP 方法选择了一个初始离散化, 未知的初始状态由涉及的物理场的采样点组成, 我们可以简单地将这些未知量表示为浮点变量。因此, 即使对于初始状态, 我们也不需要建立神经网络。因此, 使用 DP 来解决的 Burgers 重建问题简化为没有任何神经网络的基于梯度的优化。尽管如此, 这仍然是一个非常好的起点来说明这个过程。
首先,我们将设置离散模拟。这里我们使用 phiflow,如Burgers forward simulations概述部分所示。
8.1 初始化
如果我们不使用 numpy 后端,phiflow 可以直接为我们提供可微分的操作序列。这里重要的一步是加入 phi.tf.flow 代替 phi.flow (对于 pytorch,可以使用 phi.torch.flow)。
因此,第一步,让我们设置一些常量,并将velocity场初始化为零,并将我们的约束条件设置为 (步骤 16),现在作为 phiflow 中的CenteredGrid。两者都使用周期性边界条件(通过 extrapolation.PERIODIC)和 的空间离散化。
!pip install --upgrade --quiet phiflow==2.2
from phi.tf.flow import *
N = 128
DX = 2/N
STEPS = 32
DT = 1/STEPS
NU = 0.01/(N*np.pi)
# allocate velocity grid
velocity = CenteredGrid(0, extrapolation.PERIODIC, x=N, bounds=Box(x=(-1,1)))
# and a grid with the reference solution
REFERENCE_DATA = math.tensor([0.008612174447657694, 0.02584669669548606, 0.043136357266407785, 0.060491074685516746, 0.07793926183951633, 0.0954779141740818, 0.11311894389663882, 0.1308497114054023, 0.14867023658641343, 0.1665634396808965, 0.18452263429574314, 0.20253084411376132, 0.22057828799835133, 0.23865132431365316, 0.25673879161339097, 0.27483167307082423, 0.2929182325574904, 0.3109944766354339, 0.3290477753208284, 0.34707880794585116, 0.36507311960102307, 0.38303584302507954, 0.40094962955534186, 0.4188235294008765, 0.4366357052408043, 0.45439856841363885, 0.4720845505219581, 0.4897081943759776, 0.5072391070000235, 0.5247011051514834, 0.542067187709797, 0.5593576751669057, 0.5765465453632126, 0.5936507311857876, 0.6106452944663003, 0.6275435911624945, 0.6443221318186165, 0.6609900633731869, 0.67752574922899, 0.6939334022562877, 0.7101938106059631, 0.7263049537163667, 0.7422506131457406, 0.7580207366534812, 0.7736033721649875, 0.7889776974379873, 0.8041371279965555, 0.8190465276590387, 0.8337064887158392, 0.8480617965162781, 0.8621229412131242, 0.8758057344502199, 0.8891341984763013, 0.9019806505391214, 0.9143881632159129, 0.9261597966464793, 0.9373647624856912, 0.9476871303793314, 0.9572273019669029, 0.9654367940878237, 0.9724097482283165, 0.9767381835635638, 0.9669484658390122, 0.659083299684951, -0.659083180712816, -0.9669485121167052, -0.9767382069792288, -0.9724097635533602, -0.9654367970450167, -0.9572273263645859, -0.9476871280825523, -0.9373647681120841, -0.9261598056102645, -0.9143881718456056, -0.9019807055316369, -0.8891341634240081, -0.8758057205293912, -0.8621229450911845, -0.8480618138204272, -0.833706571569058, -0.8190466131476127, -0.8041372124868691, -0.7889777195422356, -0.7736033858767385, -0.758020740007683, -0.7422507481169578, -0.7263049162371344, -0.7101938950789042, -0.6939334061553678, -0.677525822052029, -0.6609901538934517, -0.6443222327338847, -0.6275436932970322, -0.6106454472814152, -0.5936507836778451, -0.5765466491708988, -0.5593578078967361, -0.5420672759411125, -0.5247011730988912, -0.5072391580614087, -0.4897082914472909, -0.47208460952428394, -0.4543985995006753, -0.4366355580500639, -0.41882350871539187, -0.40094955631843376, -0.38303594105786365, -0.36507302109186685, -0.3470786936847069, -0.3290476440540586, -0.31099441589505206, -0.2929180880304103, -0.27483158663081614, -0.2567388003912687, -0.2386513127155433, -0.22057831776499126, -0.20253089403524566, -0.18452269630486776, -0.1665634500729787, -0.14867027528284874, -0.13084990929476334, -0.1131191325854089, -0.09547794429803691, -0.07793928430794522, -0.06049114408297565, -0.0431364527809777, -0.025846763281087953, -0.00861212501518312] , math.spatial('x'))
SOLUTION_T16 = CenteredGrid( REFERENCE_DATA, extrapolation.PERIODIC, x=N, bounds=Box(x=(-1,1)))
下面我们将验证我们模拟的物理场现在是否得到了 TensorFlow 的支持。
type(velocity.values.native())
tensorflow.python.framework.ops.EagerTensor
8.2 梯度
phiflow的math.gradient操作生成一个用于标量损失的梯度函数,我们在下面使用它为选择的32个时间步长的整个模拟计算梯度。
为了在Burgers方程中使用它,我们需要计算一个适当的损失函数:我们希望在时的解与参考数据匹配。因此,我们简单地计算步骤16和约束数组之间的差异作为loss。然后,我们计算初始速度状态velocity相对于该损失的梯度函数。Phiflow的math.gradient生成一个函数,该函数返回每个参数的梯度,由于我们这里只有一个速度参数,所以grad[0]表示初始速度的梯度。
def loss_function(velocity):
velocities = [velocity]
for time_step in range(STEPS):
v1 = diffuse.explicit(1.0*velocities[-1], NU, DT, substeps=1)
v2 = advect.semi_lagrangian(v1, v1, DT)
velocities.append(v2)
loss = field.l2_loss(velocities[16] - SOLUTION_T16)*2./N # MSE
return loss, velocities
gradient_function = math.gradient(loss_function)
(loss,velocities), grad = gradient_function(velocity)
print('Loss: %f' % (loss))
Loss: 0.382915
因为我们只约束了第16个时间步长,所以在这个设置中我们实际上可以省略第17到31步。它们没有任何自由度,也没有受到任何约束。然而,为了与之前的情况进行公平比较,我们将它们包括在内。
请注意,我们在这里进行了很多计算:首先是32步模拟,然后是从损失开始的另外16步的反向传播。它们由梯度记录下来,并用于将损失反向传播到模拟的初始状态。
毫不奇怪,因为我们从零开始,第16个模拟步的初始误差也很大,约为0.38。
那么在这里我们得到了什么样的梯度呢?它与速度具有相同的维度,我们可以很容易地将其可视化:从零状态的velocity开始(显示为蓝色),第一个梯度显示为下方的绿线。如果将其与解进行比较, 可以看到它与预期的方向相反。解的大小要大得多,因此我们在这里省略了它(请参见下一个图表)。
import pylab as plt
fig = plt.figure().gca()
pltx = np.linspace(-1,1,N)
# first gradient
fig.plot(pltx, grad[0].values.numpy('x') , lw=2, color='green', label="Gradient")
fig.plot(pltx, velocity.values.numpy('x'), lw=2, color='mediumblue', label="u at t=0")
plt.xlabel('x'); plt.ylabel('u'); plt.legend();
# some (optional) other fields to plot:
# fig.plot(pltx, (velocities[16]).values.numpy('x') , lw=2, color='cyan', label="u at t=0.5")
# fig.plot(pltx, (SOLUTION_T16).values.numpy('x') , lw=2, color='red', label="solution at t=0.5")
# fig.plot(pltx, (velocities[16] - SOLUTION_T16).values.numpy('x') , lw=2, color='blue', label="difference at t=0.5")
运行结果为:
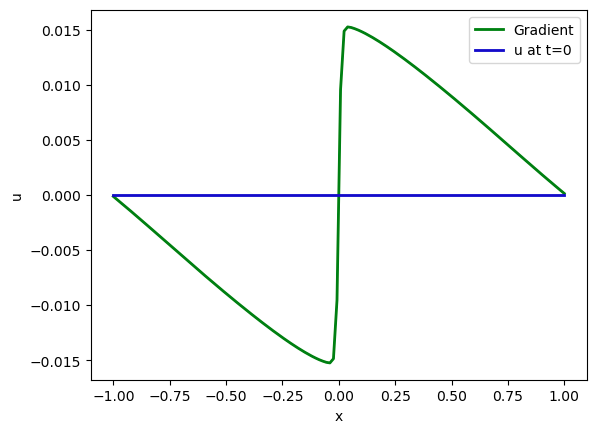
这为每个速度变量提供了一个“搜索方向”。基于线性近似,梯度告诉我们如何改变每个速度变量以增加损失函数(梯度始终指向“上方”)。因此,我们可以利用梯度进行优化,找到一个最小化损失的初始状态的速度velocity。
8.3 优化
我们现在使用梯度进行梯度下降优化。下面,我们使用学习率LR=5,并重新评估更新状态的损失以追踪收敛性。
在下面的代码块中,我们还将梯度保存在一个名为grads的列表中,以便稍后进行可视化。对于常规优化,当执行速度更新后,我们当然可以丢弃梯度。
LR = 5.
grads=[]
for optim_step in range(5):
(loss,velocities), grad = gradient_function(velocity)
print('Optimization step %d, loss: %f' % (optim_step,loss))
grads.append( grad[0] )
velocity = velocity - LR * grads[-1]
执行结果为:
Optimization step 0, loss: 0.382915
Optimization step 1, loss: 0.326882
Optimization step 2, loss: 0.281032
Optimization step 3, loss: 0.242804
Optimization step 4, loss: 0.210666
现在我们将仔细检查模拟的第16个状态是否与目标相匹配,这才是损失函数的衡量标准。下一个图表显示了约束条件(即我们希望获得的解)以绿色表示,并且在初始状态 velocity(通过梯度更新了五次)经过求解器进行了16次更新后的重构状态用蓝色表示。
fig = plt.figure().gca()
# target constraint at t=0.5
fig.plot(pltx, SOLUTION_T16.values.numpy('x'), lw=2, color='forestgreen', label="Reference")
# optimized state of our simulation after 16 steps
fig.plot(pltx, velocities[16].values.numpy('x'), lw=2, color='mediumblue', label="Simulated velocity")
plt.xlabel('x'); plt.ylabel('u'); plt.legend(); plt.title("After 5 Optimization Steps at t=0.5");
执行结果如下:
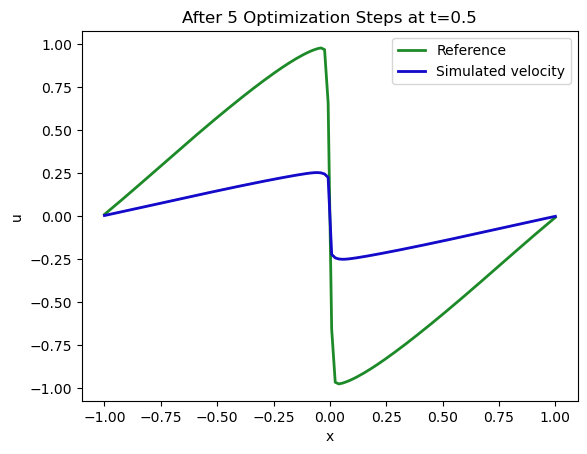
这似乎是朝着正确的方向发展!虽然还不完美,但我们目前只计算了5个梯度下降更新步骤。左侧激波上具有正速度的两个峰和右侧的负峰开始显现出来。
这是一个很好的指示,表明通过我们模拟的16个步骤反向传播的梯度表现正常,并且它正在推动解决方案朝着正确的方向发展。上面的图表只是暗示了这个设置有多么强大:我们从每个模拟步骤(以及其中的每个操作)获得的梯度可以轻松地链接成更复杂的序列。在上面的示例中,我们通过模拟的所有16个步骤进行了反向传播,通过对代码进行微小的修改,我们可以轻松地扩大这种优化的“前瞻”。
8.4 更多优化步骤
在进行更复杂的物理模拟或涉及神经网络之前,让我们先完成手头的优化任务,并运行更多步骤以获得更好的解。
import time
start = time.time()
for optim_step in range(5,50):
(loss,velocities), grad = gradient_function(velocity)
velocity = velocity - LR * grad[0]
if optim_step%5==0:
print('Optimization step %d, loss: %f' % (optim_step,loss))
end = time.time()
print("Runtime {:.2f}s".format(end-start))
运行结果:
Optimization step 5, loss: 0.183476
Optimization step 10, loss: 0.096224
Optimization step 15, loss: 0.054792
Optimization step 20, loss: 0.032819
Optimization step 25, loss: 0.020334
Optimization step 30, loss: 0.012852
Optimization step 35, loss: 0.008185
Optimization step 40, loss: 0.005186
Optimization step 45, loss: 0.003263
Runtime 130.33s
回想一下 Burgers Optimization with a Differentiable Physics Gradient中的 PINN 版本, 与可比运行时间下, 误差降低了大约两个数量级。这种行为源于 DP 为具有所有离散点和时间步骤的整个解提供梯度, 而不是局部更新。
让我们再次绘制我们在 处的解 (蓝色)与约束条件 (绿色)的匹配情况:
fig = plt.figure().gca()
fig.plot(pltx, SOLUTION_T16.values.numpy('x'), lw=2, color='forestgreen', label="Reference")
fig.plot(pltx, velocities[16].values.numpy('x'), lw=2, color='mediumblue', label="Simulated velocity")
plt.xlabel('x'); plt.ylabel('u'); plt.legend(); plt.title("After 50 Optimization Steps at t=0.5");
运行结果:
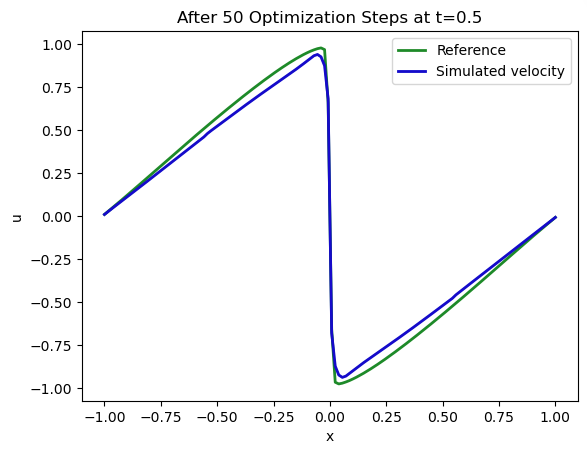
不错。但是通过 16 步模拟反向传播恢复的初始状态如何呢? 这是我们正在改变的, 而且因为它只通过后期的观测结果受到间接约束, 所以与期望的解或所需的解偏差的空间更大。
这在下一幅图中显示:
fig = plt.figure().gca()
pltx = np.linspace(-1,1,N)
# ground truth state at time=0 , move down
INITIAL_GT = np.asarray( [-np.sin(np.pi * x) for x in np.linspace(-1+DX/2,1-DX/2,N)] ) # 1D numpy array
fig.plot(pltx, INITIAL_GT.flatten() , lw=2, color='forestgreen', label="Ground truth initial state") # ground truth initial state of sim
fig.plot(pltx, velocity.values.numpy('x'), lw=2, color='mediumblue', label="Optimized initial state") # manual
plt.xlabel('x'); plt.ylabel('u'); plt.legend(); plt.title("Initial State After 50 Optimization Steps");
结果如下所示。
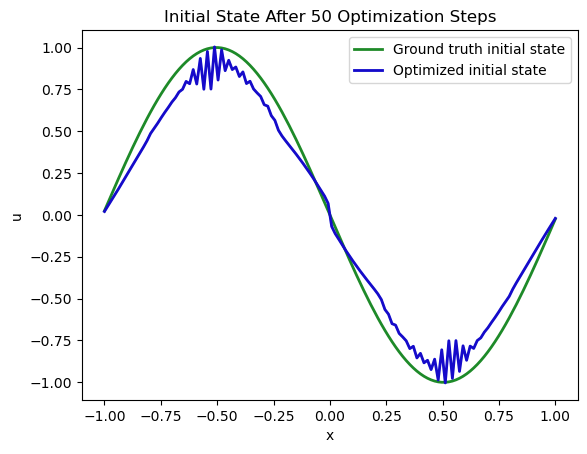
自然而然,这是一个更困难的任务:优化过程接收到了在时刻状态应该是什么的直接反馈,但由于非线性模型方程的存在,通常会有大量满足约束条件的解,这些解要么完全满足约束条件,要么在数值上非常接近。因此,我们的最小化器不一定能找到我们起始状态的确切解(在默认设置下,我们可以观察到扩散算子引起的一些数值振荡)。然而,在这个Burgers场景中,解仍然非常接近。
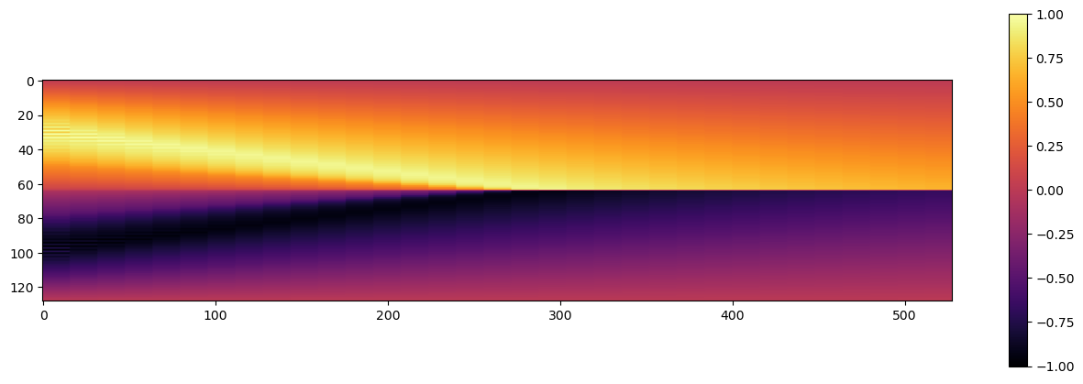
在衡量重建的整体误差之前,让我们可视化系统随时间的完整演化,因为这也会产生一个numpy数组形式的解,我们可以与其他版本进行比较。
import pylab
def show_state(a):
a=np.expand_dims(a, axis=2)
for i in range(4):
a = np.concatenate( [a,a] , axis=2)
a = np.reshape( a, [a.shape[0],a.shape[1]*a.shape[2]] )
fig, axes = pylab.subplots(1, 1, figsize=(16, 5))
im = axes.imshow(a, origin='upper', cmap='inferno')
pylab.colorbar(im)
# get numpy versions of all states
vels = [ x.values.numpy('x,vector') for x in velocities]
# concatenate along vector/features dimension
vels = np.concatenate(vels, axis=-1)
# save for comparison with other methods
import os; os.makedirs("./temp",exist_ok=True)
np.savez_compressed("./temp/burgers-diffphys-solution.npz", np.reshape(vels,[N,STEPS+1])) # remove batch & channel dimension
show_state(vels)
结果如下:
8.5 基于物理的 vs. 可微物理重建
现在我们有两个版本,一个是带有PINN的版本,另一个是DP版本,所以让我们更详细地比较这两个重建结果。(注意:以下单元格预期Burgers-forward和PINN笔记本在之前的相同环境中执行,以便./temp目录中的.npz文件可用。)
让我们首先并排查看这些解。下面的代码生成一个包含3个版本的图像,从上到下依次是:由常规正向模拟给出的真值(GT)解,中间是PINN重建,底部是可微分物理版本。
# note, this requires previous runs of the forward-sim & PINN notebooks in the same environment
sol_gt=npfile=np.load("./temp/burgers-groundtruth-solution.npz")["arr_0"]
sol_pi=npfile=np.load("./temp/burgers-pinn-solution.npz")["arr_0"]
sol_dp=npfile=np.load("./temp/burgers-diffphys-solution.npz")["arr_0"]
divider = np.ones([10,33])*-1. # we'll sneak in a block of -1s to show a black divider in the image
sbs = np.concatenate( [sol_gt, divider, sol_pi, divider, sol_dp], axis=0)
print("\nSolutions Ground Truth (top), PINN (middle) , DiffPhys (bottom):")
show_state(np.reshape(sbs,[N*3+20,33,1]))
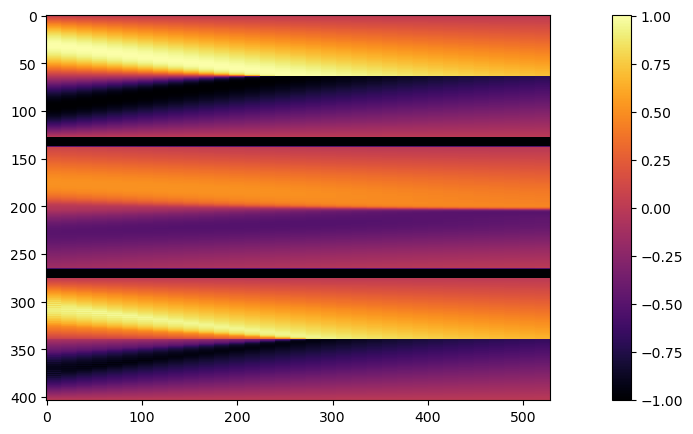
在这里很明显可以看到,PINN解决方案(中间)恢复了解的整体形状,因此时间约束至少部分得到满足。然而,它并没有很好地捕捉到GT解决方案的幅值。
与可微分求解器的优化重建(底部)相比,由于整个序列的梯度流改善,它更接近于真实情况。此外,它可以利用基于网格的离散化进行正向和反向传递,并以这种方式向未知的初始状态提供更准确的信号。然而,可以看出重建缺少GT版本的某些“更锐利”的特征,例如在解图像的左下角可见。
让我们量化整个序列的误差:
err_pi = np.sum( np.abs(sol_pi-sol_gt)) / (STEPS*N)
err_dp = np.sum( np.abs(sol_dp-sol_gt)) / (STEPS*N)
print("MAE PINN: {:7.5f} \nMAE DP: {:7.5f}".format(err_pi,err_dp))
print("\nError GT to PINN (top) , GT to DiffPhys (bottom):")
show_state(np.reshape( np.concatenate([sol_pi-sol_gt, divider, sol_dp-sol_gt],axis=0) ,[N*2+10,33,1]))
执行结果:
MAE PINN: 0.19298
MAE DP: 0.06382
Error GT to PINN (top) , GT to DiffPhys (bottom):
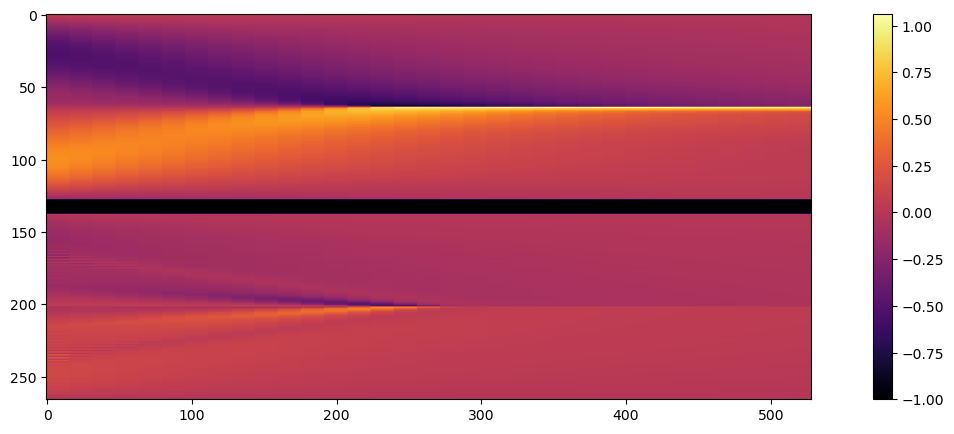
这是一个相当清晰的结果:PINN误差比可微物理(DP)重建的误差大3倍以上。
这个差异在底部的联合可视化图像中也清晰可见:DP重建的误差幅度更接近于零,如上方的紫色所示。
像这样的简单直接重建问题对于DP求解器来说总是一个很好的初始测试。在进入更复杂的设置(例如与NN耦合)之前,可以独立测试它。如果直接优化无法收敛,可能仍然存在一些根本性问题,没有必要涉及NN。
现在我们有了一个第一个示例来展示这两种方法的相似性和差异。在下一节中,我们将对迄今为止的发现进行讨论,然后在下一章中转向更复杂的情况。
8.6 下一步
与之前一样,可以使用上述代码改进和进行实验的事物有很多:
- 可以尝试调整训练参数以进一步改善重建效果。
- 激活不同的优化器,并观察收敛行为的变化(不一定是改善)。
- 改变步数或模拟和重建的分辨率。
- 尝试在
loss_function之前的一行添加@jit_compile。这将增加一次编译成本,但极大地加快了优化的速度。